



重庆机器人焊接工作站工装夹具的设计要求
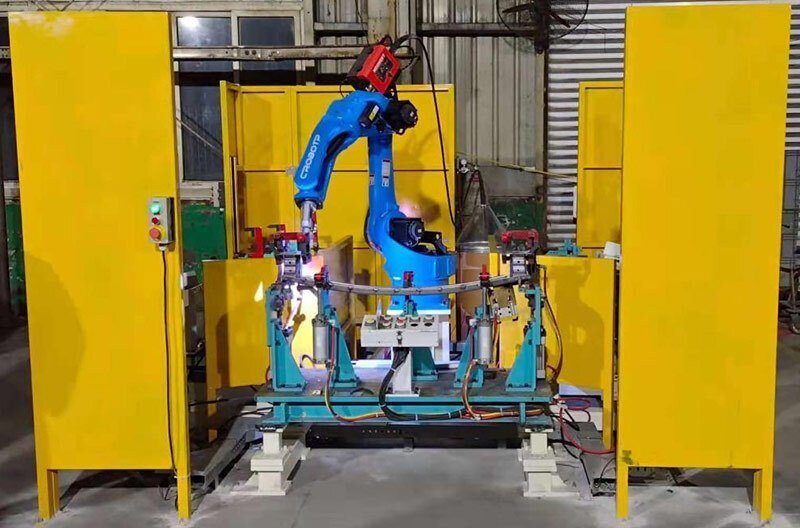
机器人焊接工作站工装夹具的设计要求一、机器人焊接工装夹具应动作迅速、操作方便,操作位置应处在工人容易接近、最易操作的部位。当夹具处于夹紧状态时,应能自锁。应有足够的装配、焊接空间,所有的定位元件和夹紧机构应与焊道保持适当的距离。机器人焊接工装夹具本身应具有较好的制造工艺性和较高的机械效率。
机器人焊接工作站工装夹具的设计要求二、机器人焊接工装夹具夹紧时不应破坏焊件的表面质量,夹紧薄件时,应限制夹紧力,或者采取压头行程限位、加大压头接触面积、加添铜、铝衬套等措施。应当夹紧可靠,刚性适当。 夹紧时不破坏焊接的定位位置和几何形状,夹紧后既不 使焊件松动滑移,又不使焊件的拘束度过大而生产较大的应力。

机器人焊接工作站工装夹具的设计要求三、机器人焊接工装夹具的施力点应位于焊件的支承处或者布置在靠近支承的地方,要防止支承反力与夹紧力、支承反力与重力形成力偶。为了便于控制,在同一个夹具上,定位器和夹紧机构的结构形式不宜过多,并且尽量只选用一种动力源。

